![]()
![]()
![]()
![]()
![]()
![]()
![]()
Wir machten uns also daran, erste Möglichkeiten für die Realisierung zu finden. Dabei gab es für uns drei Probleme.
ein Fahrgestell zu Entwickeln, welches eine Drehung des kompletten Systems in horizontaler Richtung ermöglicht
einen "Arm" zu entwickeln, welcher eine Ausrichtung in vertikaler Richtung ermöglicht
einen Aufbau zu realisieren, welcher das Licht von nur einer Richtung erfassen kann (von uns Shutter genannt)
Bei der ersten Version unseres Fahrgestells versuchten wir, mit den Ketten des LEGO- Sets ein drehbares Grundgerüst zu realisieren. Beim Test dieses fahrbaren Untersatzes merkten wir jedoch, dass die Position sehr ungenau eingehalten wurde. Weiterhin war ein starkes Ruckeln zu beobachten, welches für eine genaue Positionierung sehr hinderlich war. Auf der folgenden Abbildung ist das realisierte Fahrgestell zu sehen. Wir griffen nach den missglückten Versuchen des Kettengefährts die Idee auf, ein Getriebe zu entwerfen, welches in der Lage ist vier Räder in der gleichen Richtung zu drehen. Der Test dieses Gerüstes verlief mit sehr guten Resultaten und wurde dann auch eingesetzt. Weiter Informationen sind auf der Seite Aufbau erkennbar.

Mit dem Fahrgestell ließ sich unser System in horizontaler Richtung drehen. Für ein erfolgreiches Auffinden der Sonne war es aber weiterhin nötig, eine vertikale Bewegung ausführen zu können. Aus diesem Grund entwickelten wir einen Arm, der in der Lage war, die zum Einsatz kommende Optik auch von oben nach unten (und umgekehrt) zu bewegen. Der Abzudeckende Bereich erstreckte sich über einen Winkel von 90 Grad. Mit den 360 Grad der horizontalen Bewegung konnte man somit eine komplette Halbkugel abtasten. Wir gingen davon aus, dass die Sonne nicht unter der Nulllinie des Gefährtes zu finden ist. Sollte dies dennoch der Fall sein, so ist die Leistung der Solarzellen wahrscheinlich so gering, dass eine korrekte Nachführung in diesem Bereich wenig Effizienz bietet. Zwei Endschalter sollten dem System die Minimum- und Maximumposition bekannt geben. Auch von der Realisierung dieses gesteuerten Armes ist eine Abbildung zu sehen, die auf der Seite Aufbau weiter verdeutlicht wird.

Das größte Problem war für uns die Realisierung der Optik. Uns stand im Set nur ein einziger Lichtsensor zur Verfügung. Es musste also eine Mechanik und/oder Optik entwickelt werden die es erlaubt, Licht nur in einer Richtung abzutasten. Die Helligkeit der nicht betrachteten Stellen durfte keinen Einfluss haben. Da nur ein Sensor vorhanden war, nutzten wir nur die möglichen Bewegungen des Fahrgestells und des Armes aus, einen Punkt maximaler Helligkeit zu finden.
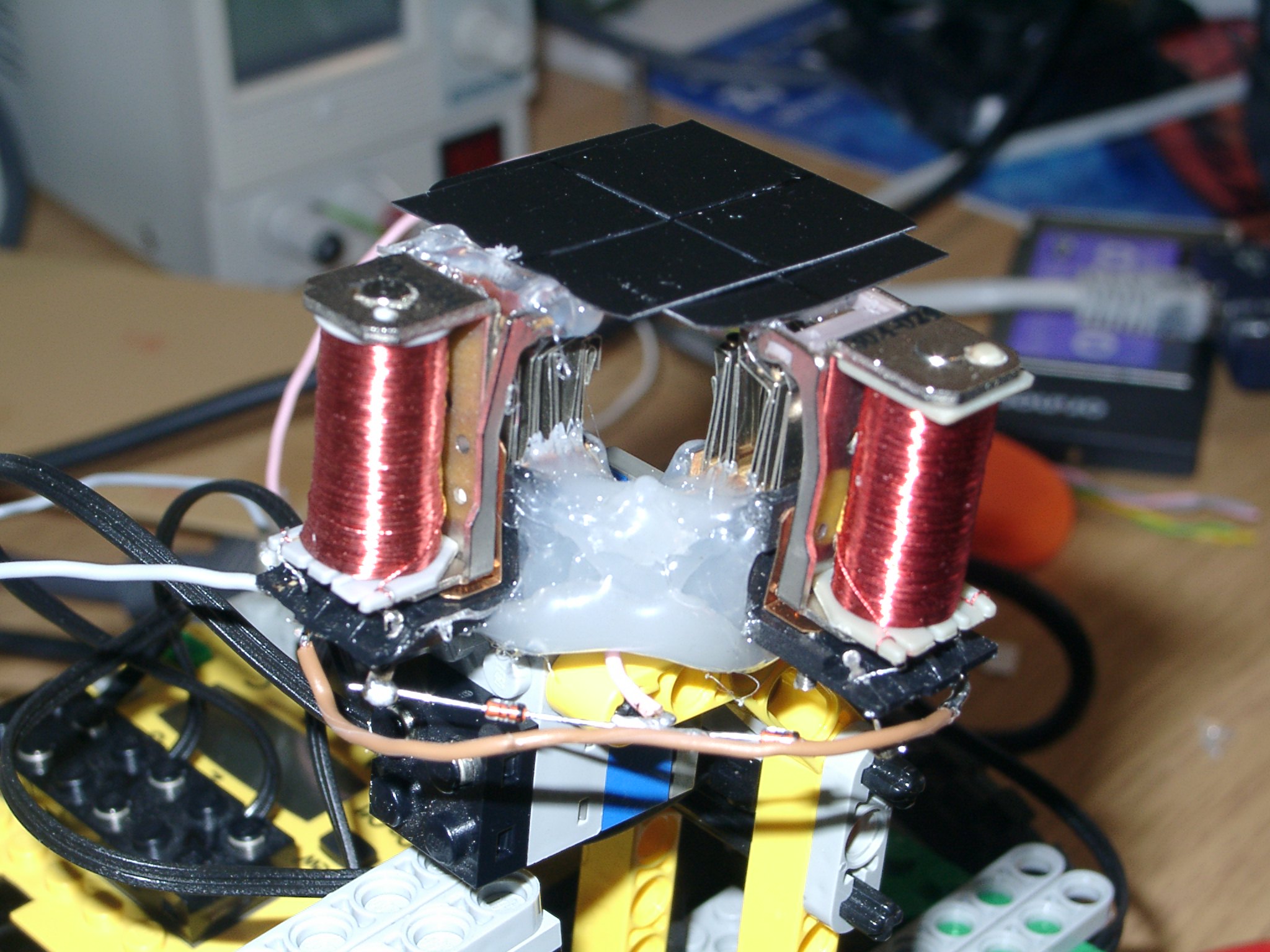
Der erste Versuch einer Optik misslang. Wir schnitten in eine Dose ein Kreuz. Dieses Kreuz ließ Licht nur aus der horizontalen sowie vertikalen Ebene auf den Lichtsensor fallen. Damit ließ sich aber nur sehr schlecht arbeiten. Die Folge war eine ungenaue Ausrichtung zur Sonne. Deshalb kamen wir auf die Idee, einen Shutter (von englisch shut = schließen) zu bauen. In zwei Plastikscheiben sollten Kreuze geschnitten werden, die es durch gegenseitiges Verschieben erlauben, einen der beiden Schlitze im Kreuz zu schließen und somit über den Anderen eine genaue Helligkeit zu bestimmen. Wir kamen auf die Idee, zwei Relais ihrem Zweck zu entfremden und an den Arbeitskontakt, welcher das Relais schließt, die beiden Plastikscheiben zu befestigen. Auch hier ist eine Abbildung eingefügt, um die Funktionsweise des Angesprochenen besser zu verdeutlichen.