![]()
![]()
![]()
![]()
![]()
![]()
![]()
|
|
|
|
|
|
|
 |
 |
 |
 |
 |
 |
 |
Sunny als Bilderserie (erstellt mit LeoCad - Auflösung 2048 x 1536 Pixel)
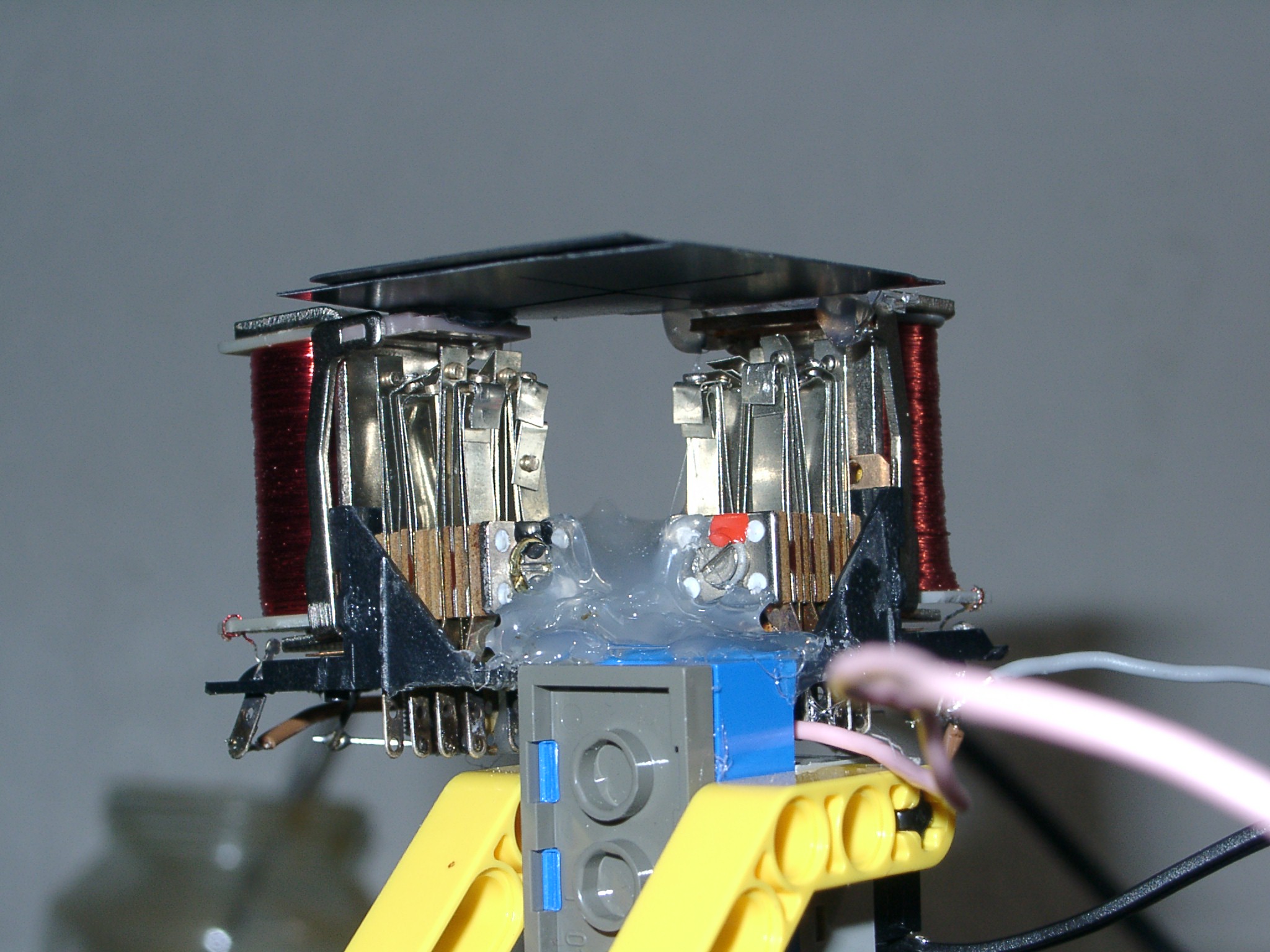
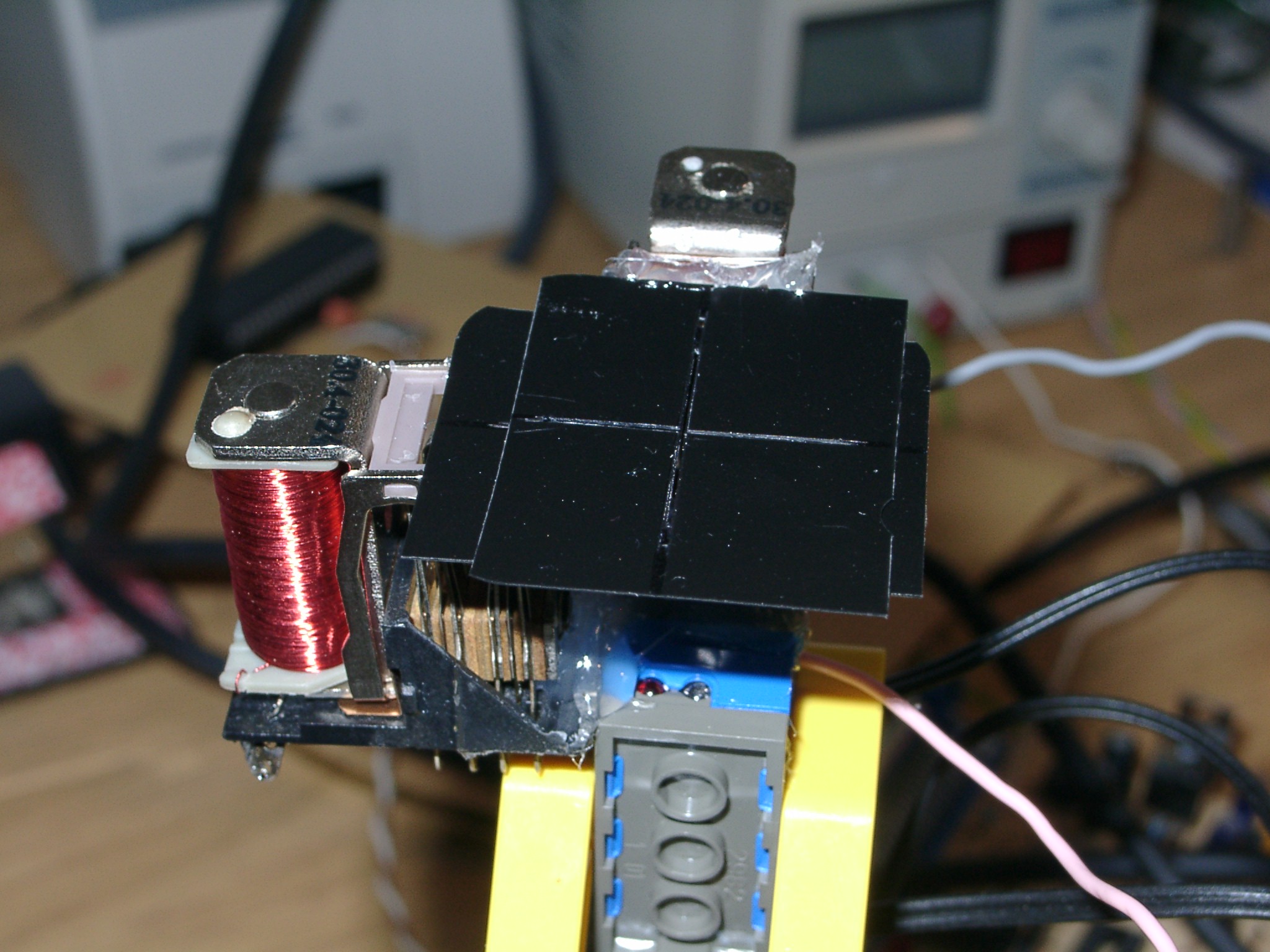
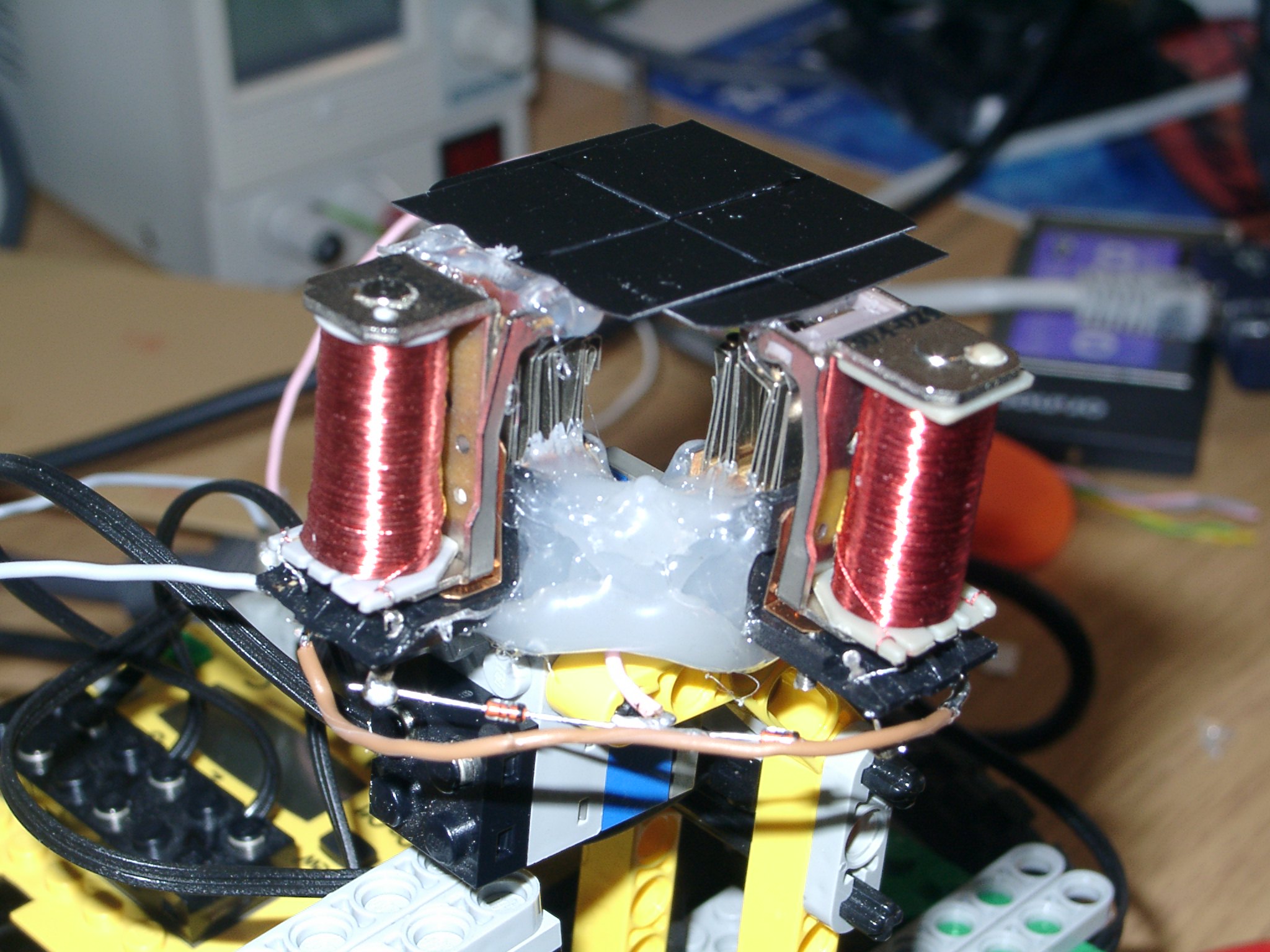
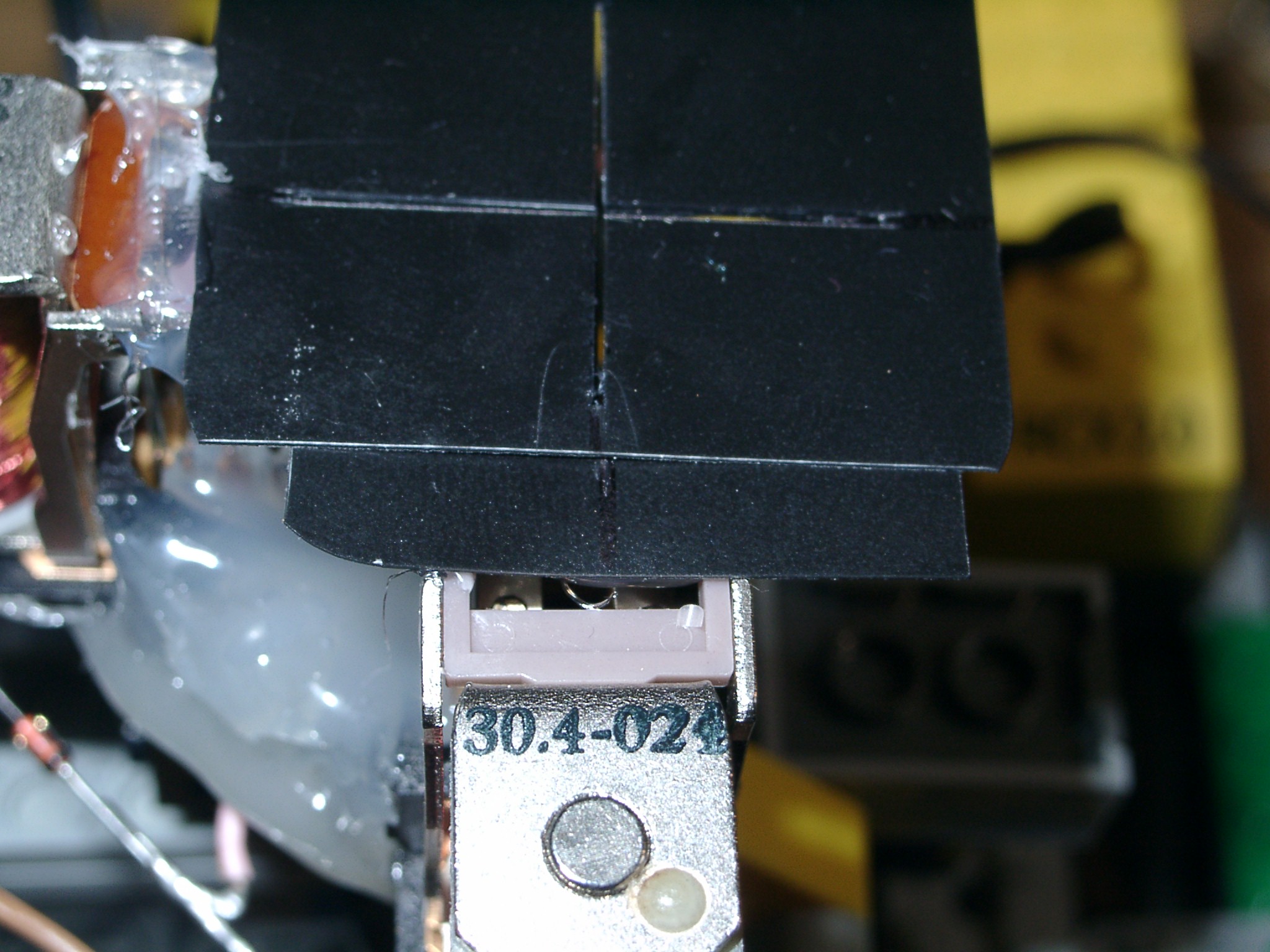
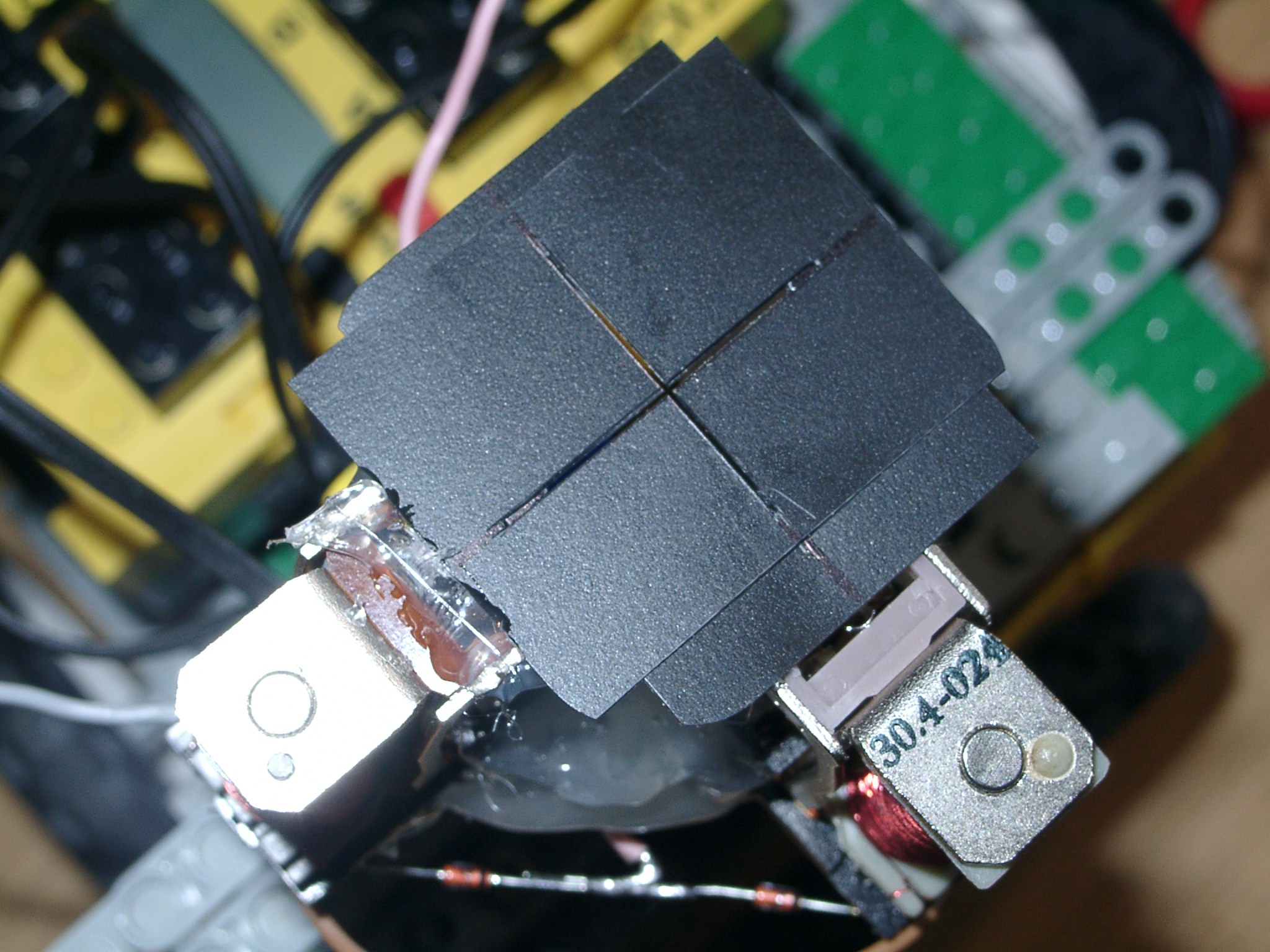
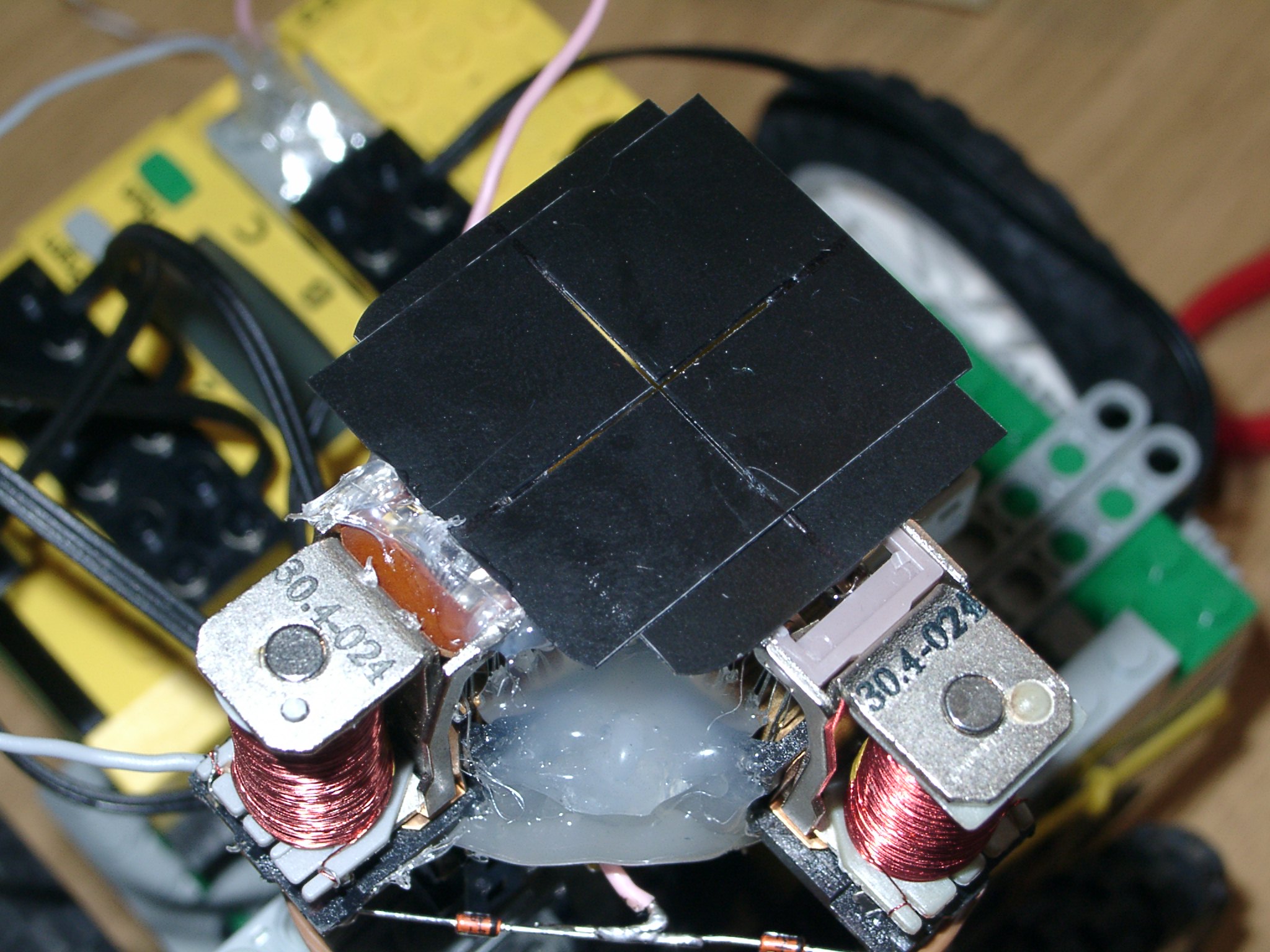
Der Aufbau des Shutters auf die LEGO- Bausteine ist nicht zu
sehen. Wir haben diesen mit Heißkleber auf dem Fahrgestell aufgeklebt, da dieser
sehr gut hält, sich von den glatten Oberflächen aber dennoch gut entfernen
lässt. Weiterhin ist noch zu beachten, dass die Schwingungen des Armes für die
vertikale Bewegung mit einem Gummi abgedämpft wurden. Wird dies nicht gemacht,
so ist aufgrund der Ungenauigkeit der Zahnräder und des Motors ein starkes
Schwingen bei der Abwärtsbewegung zu erkennen, welches sich negativ auf die
Genauigkeit des Sunny auswirkt. Diese Konstruktionen sind auf der Seite
Bilder und Videos noch einmal erkennbar.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Beim Einschalten des Roboters fahrt Sunny den Arm einmal komplett an beide Endschalter, um die Spanne zu ermitteln, in der er vertikal arbeiten kann. Danach dreht er sich einmal um die eigene Achse, um den Punkt der horizontalen maximalen Helligkeit zu ermitteln. Dabei merkt sich der Steuerkontroller die Systemzeit der letzten hellsten Position und fährt nach abgeschlossener Runde an diesen Punkt zurück. Durch die Differenz der Systemzeit mit der festgehaltenen Position weiß der Kontroller, wie weit er zurückzufahren hat. Ist die horizontale Positionierung abgeschlossen, so beginnt die vertikale Helligkeitsbestimmung. Auch hier wird die Position über die Systemzeit berechnet. Sind die Bewegungen abgeschlossen, so ist der erste Positionierungsvorgang beendet und Sunny sollte mit dem Arm in Richtung Sonne zeigen.
Ändert sich die Helligkeit am Sensor (die Werte werden auf dem Display ausgegeben) dann beginnt Sunny, die Umgebung der momentanen Position abzusuchen und in ihr einen neuen hellen Punkt zu finden, nach dem er sich erneut ausrichtet. Dies ist nicht an eine zeitliche Begrenzung gebunden, sondern wird als kontinuierlicher Prozess ausgeführt. Alle hier angegebenen Verhaltensweisen sind in dem Demonstrationsvideo auf der Seite Bilder und Videos zu sehen.