Robotic Seeding Machine
Matthias Weyh
II 2000
|
Einführung
Aufbau
Software
Anleitung
Multimediales
Abschließendes
|
An dieser Stelle möchten wir näher auf den Aufbau des Lego Modells und den Anschluß der Aktoren und Sensoren eingehen.
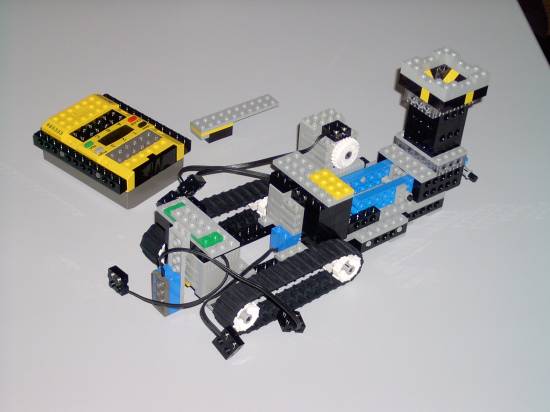
Als Sensoren wurden ein Rotationssensor für den rechten Motor und ein Lichtsensor für die Spurverfolgung installiert. Der Lichtsensor befand sich am Anschluß 2 und der Rotationssensor an Anschluß 3. Der 1. Anschluß war nicht belegt. Es wäre allerdings sinnvoll hier einen zweiten Rotationssensor anzuschließen, um die Auswertung der gefahrenen Bahn zu verbessern. Als Aktoren wurden 3 Motoren eingesetzt, wobei an den Anschlüssen a und c die Motoren zum Fahren und Lenken (Motor links und rechts) angeschlossen waren. Der dritte Motor war zum Auswerfen der "Samen" an der Auswurfmechanik und an Aktoranschluß b angebracht.
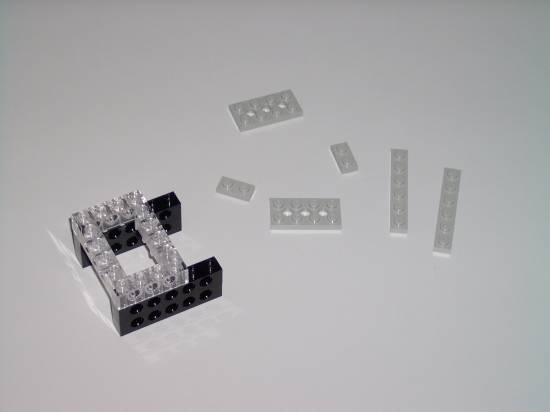
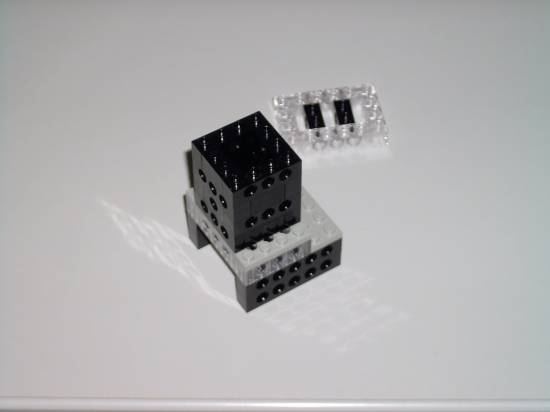
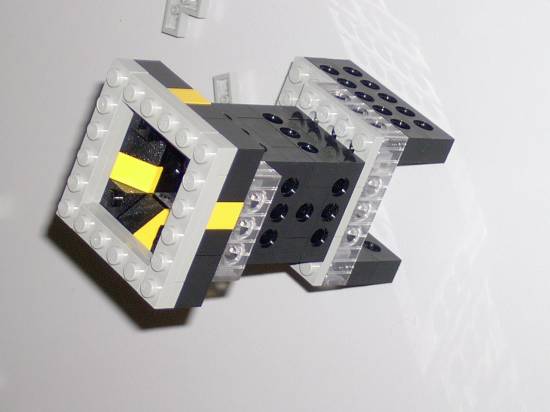
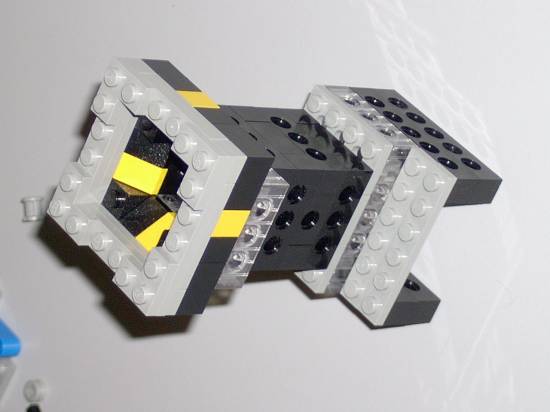
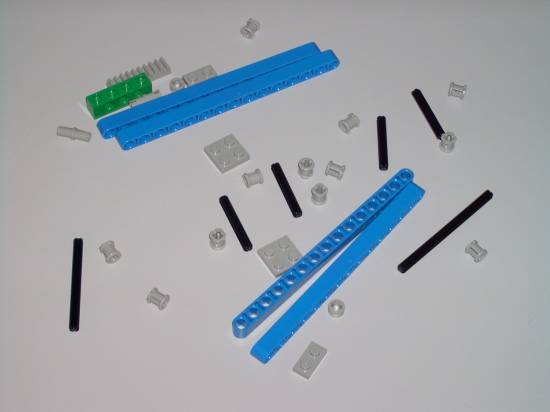
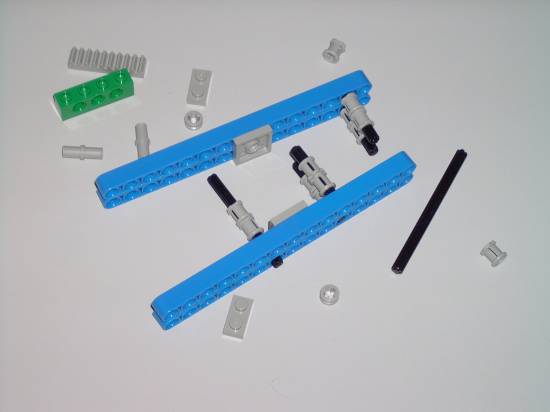
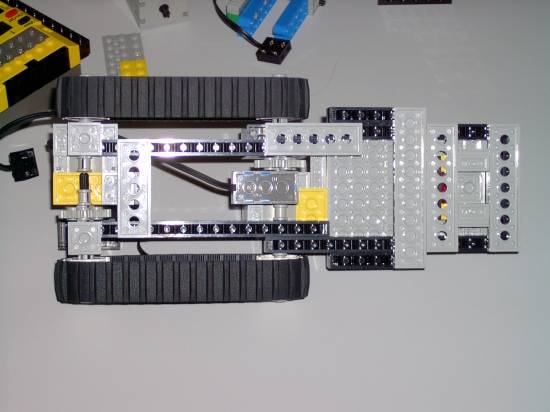
   Von links nach rechts: Motor, optischer Sensor und Rotationssensor Auf den folgenden Bildern kann man den schrittweisen Aufbau des Modells verfolgen um es nachbauen zu können.
                             |