Die Lenkung
1.1
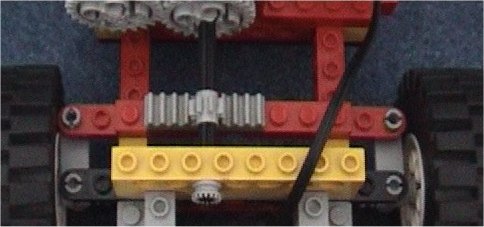
Eigentlich eine LEGO – Standart- lenkung.
Wären da nicht der Motor (1) als Antrieb
und ein Sensor (2) mit dem man den Lenkwinkel erfassen kann.
Der Motor (1) wird später vom RCX gesteuert.
Er überdeckt leicht den Schaltantrieb.
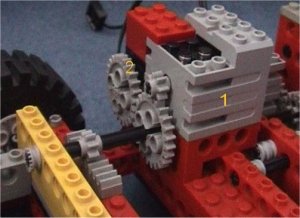
Der Sensor (2) hat es in sich.
Er ist kein LEGO Originalteil, sondern ein Selbstbau.

Wer ihn nachbauen möchte sollte schon ein bisschen handwerkliches Geschick mitbringen.
Die benötigten Teile sind im untenstehenden Bild zu sehen.
Er lässt sich sehr viel besser nachbauen, wenn man die Möglichkeit hat
mit eine DREMEL Multi oder einer PROXON zu fräsen.
Das eingesetzte Potentiometer ist ein 47kW mit linearem Verlauf.
Die kleine schwarze Welle passt in die Öffnung des Potis.
Beides kann man im Elektronikhandel bekommen.

Die Welle muss nun so bearbeitet werden, dass von hinten in das graue Teil passt.
Am besten geht das, wenn man sie vorsichtig in eine kleine Bohrmaschine einspannt
und mit eine Raspel oder einem Skalpell abarbeitet. Dabei ist es sehr wichtig, dass man oft probiert.
Die Welle soll später ja gleich zwei Aufgaben übernehmen. Erstens das Poti bewegen
und zweitens soll sie überrutschen, wenn es am Anschlag ist. Außerdem muss Welle dann noch soweit gekürzt werden,
dass Potentiometer und das graue Teil nach dem Zusammen sehr eng aneinander liegen.
Als Grundlage verwendet man eine 2x4 Platte.
Diese wird so bearbeitet, dass die Seite des Poti’s
mit den zwei Anschlüssen darin eine Führung hat.
Auch hier gilt: immer wieder probieren.
Den Abschluss dieser Bastellei bildet der Deckstein.
Er muss das Poti oben halten und stellt die elektrische Verbindung zum RCX her.
Und so werden die Anschlüsse angelötet:
Wir haben unseren Winkelsensor dann noch mit Zweikomponentenkleber verklebt.
Wir möchten noch bemerken, dass wir von einer Internetseite inspiriert worden sind.
www.plazaearth.com/usr/gasperi/pot.htm